#include <Controller.hpp>
Public Member Functions | |
| Controller () | |
| virtual | ~Controller () |
| virtual controller_info_getter_s const * | getInfo () const |
| Provides a hook for retrieving specialized DOF and gain names, if provided. | |
| virtual Status | init (Model const &model) |
| Default init just returns ok. | |
| virtual Status | setGoal (Vector const &goal)=0 |
| virtual Status | getGoal (Vector &goal) const =0 |
| virtual Status | getActual (Vector &actual) const =0 |
| virtual Status | setGains (Vector const &kp, Vector const &kd)=0 |
| virtual Status | getGains (Vector &kp, Vector &kd) const =0 |
| virtual Status | latch (Model const &model)=0 |
| This method is supposed to be called just before the first call to computeCommand(), in order to allow the controller to set the goal to the current state. | |
| virtual Status | computeCommand (Model const &model, Vector &tau)=0 |
Protected Attributes | |
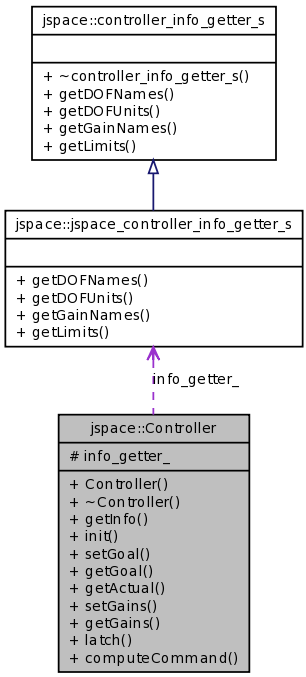
| jspace_controller_info_getter_s * | info_getter_ |
Definition at line 59 of file Controller.hpp.
| jspace::Controller::Controller | ( | ) |
Definition at line 84 of file Controller.cpp.
| jspace::Controller::~Controller | ( | ) | [virtual] |
| controller_info_getter_s const * jspace::Controller::getInfo | ( | ) | const [virtual] |
Provides a hook for retrieving specialized DOF and gain names, if provided.
Specific Controller subclasses can override this method in order to inform higher levels about how to refer to the degrees of freedom etc. Useful mostly for operational space controllers.
Definition at line 98 of file Controller.cpp.
References info_getter_.
Default init just returns ok.
You should only call this with a fully initialized model, because controllers might need to inspect the state.
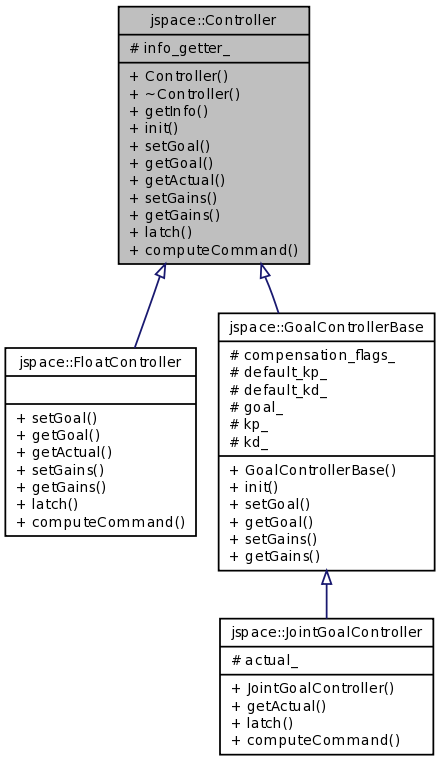
Reimplemented in jspace::GoalControllerBase.
Definition at line 84 of file Controller.hpp.
Implemented in jspace::FloatController, and jspace::GoalControllerBase.
Implemented in jspace::FloatController, and jspace::GoalControllerBase.
Implemented in jspace::FloatController, and jspace::JointGoalController.
Implemented in jspace::FloatController, and jspace::GoalControllerBase.
Implemented in jspace::FloatController, and jspace::GoalControllerBase.
This method is supposed to be called just before the first call to computeCommand(), in order to allow the controller to set the goal to the current state.
This is important for applications where we switch controllers at runtime.
Implemented in jspace::FloatController, and jspace::JointGoalController.
| virtual Status jspace::Controller::computeCommand | ( | Model const & | model, | |
| Vector & | tau | |||
| ) | [pure virtual] |
Implemented in jspace::FloatController, and jspace::JointGoalController.
jspace_controller_info_getter_s* jspace::Controller::info_getter_ [mutable, protected] |
 1.5.4
1.5.4