#include <controller_library.hpp>
Public Member Functions | |
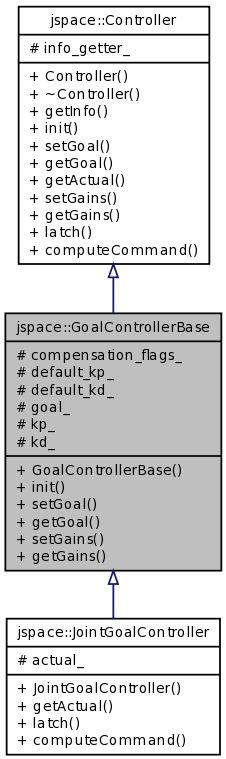
| GoalControllerBase (int compensation_flags, Vector const &default_kp, Vector const &default_kd) | |
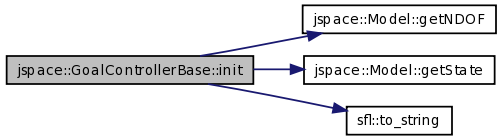
| virtual Status | init (Model const &model) |
| Default init just returns ok. | |
| virtual Status | setGoal (Vector const &goal) |
| virtual Status | getGoal (Vector &goal) const |
| virtual Status | setGains (Vector const &kp, Vector const &kd) |
| virtual Status | getGains (Vector &kp, Vector &kd) const |
Protected Attributes | |
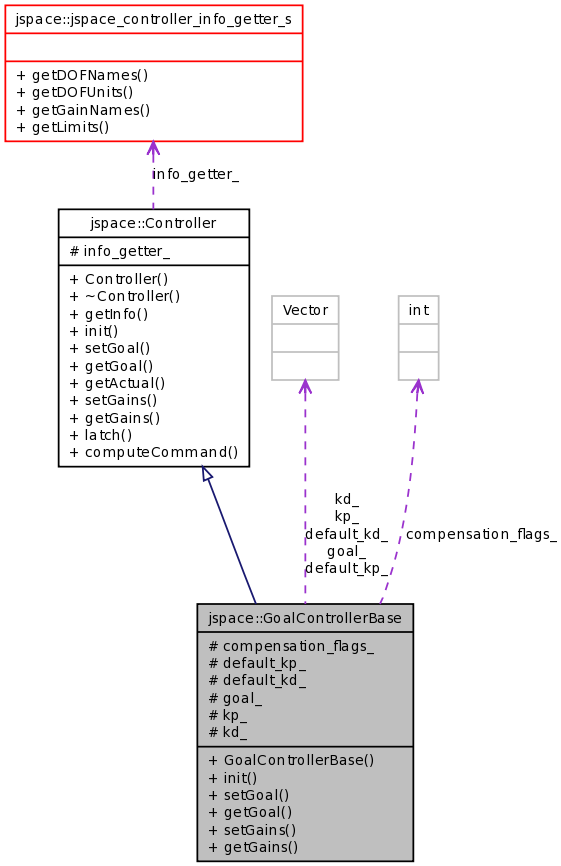
| int | compensation_flags_ |
| Vector | default_kp_ |
| Vector | default_kd_ |
| Vector | goal_ |
| Vector | kp_ |
| Vector | kd_ |
Definition at line 60 of file controller_library.hpp.
| jspace::GoalControllerBase::GoalControllerBase | ( | int | compensation_flags, | |
| Vector const & | default_kp, | |||
| Vector const & | default_kd | |||
| ) |
Definition at line 99 of file controller_library.cpp.
Default init just returns ok.
You should only call this with a fully initialized model, because controllers might need to inspect the state.
Reimplemented from jspace::Controller.
Definition at line 110 of file controller_library.cpp.
References default_kd_, default_kp_, jspace::Status::errstr, jspace::Model::getNDOF(), jspace::Model::getState(), goal_, kd_, kp_, ndof, jspace::Status::ok, jspace::State::position_, and sfl::to_string().
Implements jspace::Controller.
Definition at line 145 of file controller_library.cpp.
References jspace::Status::errstr, goal_, jspace::Status::ok, and sfl::to_string().

Implements jspace::Controller.
Definition at line 161 of file controller_library.cpp.
References goal_.
Implements jspace::Controller.
Definition at line 170 of file controller_library.cpp.
References jspace::Status::errstr, kd_, kp_, and jspace::Status::ok.
int jspace::GoalControllerBase::compensation_flags_ [protected] |
Definition at line 77 of file controller_library.hpp.
Referenced by jspace::JointGoalController::computeCommand().
Vector jspace::GoalControllerBase::default_kp_ [protected] |
Vector jspace::GoalControllerBase::default_kd_ [protected] |
Vector jspace::GoalControllerBase::goal_ [protected] |
Definition at line 80 of file controller_library.hpp.
Referenced by jspace::JointGoalController::computeCommand(), getGoal(), init(), jspace::JointGoalController::latch(), and setGoal().
Vector jspace::GoalControllerBase::kp_ [protected] |
Definition at line 81 of file controller_library.hpp.
Referenced by jspace::JointGoalController::computeCommand(), getGains(), init(), and setGains().
Vector jspace::GoalControllerBase::kd_ [protected] |
Definition at line 82 of file controller_library.hpp.
Referenced by jspace::JointGoalController::computeCommand(), getGains(), init(), and setGains().
 1.5.4
1.5.4