#include <Model.hpp>
Public Member Functions | |
| Model () | |
| Please use the init() method in order to initialize your jspace::Model. | |
| ~Model () | |
| int | init (tao_tree_info_s *kgm_tree, tao_tree_info_s *cc_tree, std::ostream *msg) |
| Initialize the model with a TAO tree. | |
| void | update (State const &state) |
| Calls setState(), updateKinematics(), and updateDynamics(). | |
| void | setState (State const &state) |
| Inform the model about the joint state. | |
| State const & | getState () const |
| Retrieve the state passed to setState() (or update(), for that matter). | |
| size_t | getNNodes () const |
| Compute or retrieve the cached number of nodes in the robot. | |
| size_t | getNJoints () const |
| Compute or retrieve the cached number of joints in the robot. | |
| size_t | getNDOF () const |
| Compute or retrieve the cached number of degrees of freedom of the robot. | |
| std::string | getNodeName (size_t id) const |
| Retrieve the name of a node. | |
| std::string | getJointName (size_t id) const |
| Retrieve the name of a joint. | |
| taoDNode * | getNode (size_t id) const |
| Retrieve a node by ID. | |
| taoDNode * | getNodeByName (std::string const &name) const |
| Retrieve a node by its name. | |
| taoDNode * | getNodeByJointName (std::string const &name) const |
| Retrieve a node by joint name. | |
| void | getJointLimits (Vector &joint_limits_lower, Vector &joint_limits_upper) const |
| Retrieve joint limit information. | |
| void | updateKinematics () |
| Computes the node origins wrt the global frame. | |
| bool | getGlobalFrame (taoDNode const *node, Transform &global_transform) const |
| Retrieve the frame (translation and rotation) of a node origin. | |
| bool | computeGlobalFrame (taoDNode const *node, Transform const &local_transform, Transform &global_transform) const |
| Compute the global frame (translation and rotation) corresponding to a local frame expressed wrt the origin of a given node. | |
| bool | computeGlobalFrame (taoDNode const *node, double local_x, double local_y, double local_z, Transform &global_transform) const |
| Convenience method in case you are only interested in the translational part and hold the local point in three doubles. | |
| bool | computeGlobalFrame (taoDNode const *node, Vector const &local_translation, Transform &global_transform) const |
| Convenience method in case you are only interested in the translational part and hold the local point in a three-dimensional vector. | |
| bool | computeGlobalCOMFrame (taoDNode const *node, Transform &global_com_transform) const |
| bool | computeJacobian (taoDNode const *node, Matrix &jacobian) const |
| Compute the Jacobian (J_v over J_omega) at the origin of a given node. | |
| bool | computeJacobian (taoDNode const *node, double gx, double gy, double gz, Matrix &jacobian) const |
| Compute the Jacobian (J_v over J_omega) for a given node, at a point expressed wrt to the global frame. | |
| bool | computeJacobian (taoDNode const *node, Vector const &global_point, Matrix &jacobian) const |
| Convenience method in case you are holding the global position in a three-dimensional vector. | |
| void | updateDynamics () |
| Calls computeGravity(), computeCoriolisCentrifugal(), computeMassInertia(), and computeInverseMassInertia(). | |
| bool | computeCOM (Vector &com, Matrix *opt_jcom) const |
| Computes the location of the center of gravity, and optionally also its Jacobian. | |
| void | computeGravity () |
| Compute the gravity joint-torque vector. | |
| bool | disableGravityCompensation (size_t index, bool disable) |
| Disable (or enable) gravity compensation for a given DOF (specified using its index). | |
| bool | getGravity (Vector &gravity) const |
| Retrieve the gravity joint-torque vector. | |
| void | computeCoriolisCentrifugal () |
| Compute the Coriolis and contrifugal joint-torque vector. | |
| bool | getCoriolisCentrifugal (Vector &coriolis_centrifugal) const |
| Retrieve the Coriolis and contrifugal joint-torque vector. | |
| void | computeMassInertia () |
| Compute the joint-space mass-inertia matrix, a.k.a. | |
| bool | getMassInertia (Matrix &mass_inertia) const |
| Retrieve the joint-space mass-inertia matrix, a.k.a. | |
| void | computeInverseMassInertia () |
| Compute the inverse joint-space mass-inertia matrix. | |
| bool | getInverseMassInertia (Matrix &inverse_mass_inertia) const |
| Retrieve the inverse joint-space mass-inertia matrix. | |
| tao_tree_info_s * | _getKGMTree () |
| For debugging only, access to the kinematics-gravity-mass-inertia tree. | |
| tao_tree_info_s * | _getCCTree () |
| For debugging only, access to the optional Coriolis-centrifugal tree. | |
Classes | |
| struct | ancestry_entry_s |
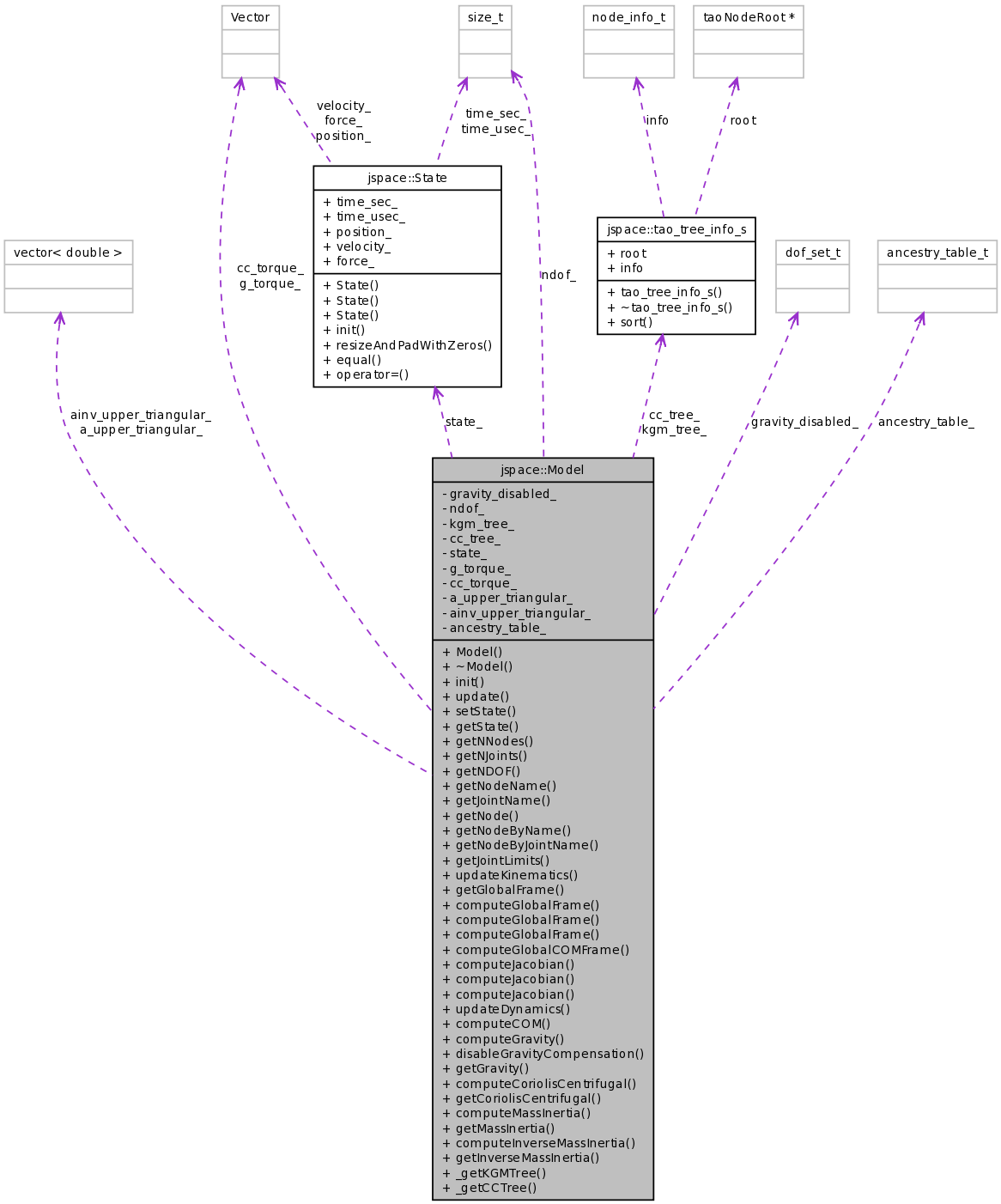
Definition at line 48 of file Model.hpp.
| jspace::Model::Model | ( | ) |
Please use the init() method in order to initialize your jspace::Model.
It does some sanity checking, and error handling from within a constructor is just not so great.
| int jspace::Model::init | ( | tao_tree_info_s * | kgm_tree, | |
| tao_tree_info_s * | cc_tree, | |||
| std::ostream * | msg | |||
| ) |
Initialize the model with a TAO tree.
Actually, it needs two copies of the same tree if you want to estimate centrifugal and Coriolis effects, but that is optional.
This method also does some sanity checks and will return a non-zero error code if something is amiss. In order to get human-readable error strings, just pass a non-NULL msg pointer in as well. For instance, &std::cout will do nicely in most cases.
| kgm_tree | TAO tree info used for computing kinematics, the gravity torque vector, the mass-inertia matrix, and its inverse. This tree will be deleted in the jspace::Model destructor. |
| cc_tree | Optional TAO tree info for computing Coriolis and centrifugal torques. If you set this to NULL, then the Coriolis and centrifugal forces won't be computed. This tree will be deleted in the jspace::Model destructor. |
| msg | Optional stream that will receive error messages from the consistency checks. |
Definition at line 69 of file Model.cpp.
References jspace::tao_tree_info_s::info, jspace::tao_tree_info_s::root, jspace::tao_tree_info_s::sort(), and jspace::tao_consistency_check().

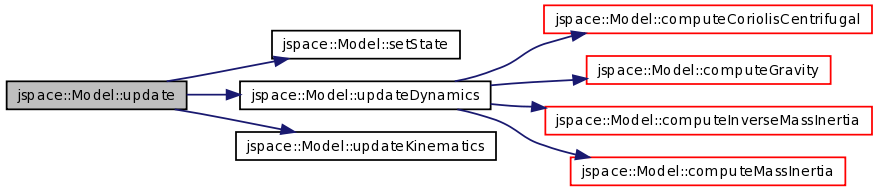
| void jspace::Model::update | ( | State const & | state | ) |
Calls setState(), updateKinematics(), and updateDynamics().
After calling the update() method, you can use any of the other methods without worrying whether you have already called the corresponding computeFoo() method.
Definition at line 149 of file Model.cpp.
References setState(), updateDynamics(), and updateKinematics().
Referenced by get_puma().
| void jspace::Model::setState | ( | State const & | state | ) |
Inform the model about the joint state.
We have to separate the state update from the computation of the various quantities in order to efficiently use the TAO tree representation, which forces us to distribute the state over its nodes before computing the model.
Definition at line 158 of file Model.cpp.
References jspace::tao_tree_info_s::info.
Referenced by update().
| State const& jspace::Model::getState | ( | ) | const [inline] |
Retrieve the state passed to setState() (or update(), for that matter).
Definition at line 124 of file Model.hpp.
Referenced by opspace::ClassicTaskPostureController::computeCommand(), jspace::JointGoalController::computeCommand(), tut04::JTask::init(), tut03::JTask::init(), tut02::JTask::init(), opspace::JPosTrjTask::init(), opspace::SelectedJointPostureTask::init(), opspace::JPosTask::init(), opspace::DraftPIDTask::init(), jspace::GoalControllerBase::init(), jspace::JointGoalController::latch(), tut04::JTask::update(), tut03::JTask::update(), tut02::JTask::update(), opspace::JointLimitTask::update(), opspace::JPosTrjTask::update(), opspace::CartPosTrjTask::update(), opspace::SelectedJointPostureTask::update(), opspace::JPosTask::update(), opspace::CartPosTask::update(), opspace::DraftPIDTask::update(), opspace::OrientationTask::updateActual(), opspace::JointLimitTask::updateState(), and tut05::PTask::updateStateAndJacobian().
| size_t jspace::Model::getNNodes | ( | ) | const |
Compute or retrieve the cached number of nodes in the robot.
| size_t jspace::Model::getNJoints | ( | ) | const |
Compute or retrieve the cached number of joints in the robot.
Note that each joint can have any number of degrees of freedom, which is why getNDOF() might come in handy, too.
Definition at line 188 of file Model.cpp.
Referenced by jspace::jspace_controller_info_getter_s::getDOFNames(), and jspace::jspace_controller_info_getter_s::getDOFUnits().
| size_t jspace::Model::getNDOF | ( | ) | const |
Compute or retrieve the cached number of degrees of freedom of the robot.
Note that each joint can have any number of degrees of freedom, which is why this method might return something else than getNJoints().
Definition at line 196 of file Model.cpp.
Referenced by opspace::ClassicTaskPostureController::computeCommand(), jspace::JointGoalController::computeCommand(), get_puma(), tut04::JTask::init(), tut03::JTask::init(), tut02::JTask::init(), opspace::JointLimitTask::init(), opspace::JPosTrjTask::init(), opspace::SelectedJointPostureTask::init(), opspace::JPosTask::init(), opspace::DraftPIDTask::init(), jspace::GoalControllerBase::init(), and opspace::JointLimitTask::updateState().
| std::string jspace::Model::getNodeName | ( | size_t | id | ) | const |
Retrieve the name of a node.
Returns an empty string in case the id is invalid. Use getNNodes() to find out how many nodes there are.
Definition at line 204 of file Model.cpp.
References jspace::tao_tree_info_s::info.
| std::string jspace::Model::getJointName | ( | size_t | id | ) | const |
Retrieve the name of a joint.
Returns an empty string in case the id is invalid. Use getNJoints() to find out how many joints there are.
Definition at line 215 of file Model.cpp.
References jspace::tao_tree_info_s::info.
Referenced by jspace::jspace_controller_info_getter_s::getDOFNames().
| taoDNode * jspace::Model::getNode | ( | size_t | id | ) | const |
Retrieve a node by ID.
Definition at line 226 of file Model.cpp.
References jspace::tao_tree_info_s::info.
Referenced by jspace::jspace_controller_info_getter_s::getDOFUnits(), opspace::OrientationTask::updateActual(), opspace::CartPosTrjTask::updateActual(), and tut05::PTask::updateStateAndJacobian().
| taoDNode * jspace::Model::getNodeByName | ( | std::string const & | name | ) | const |
Retrieve a node by its name.
Definition at line 236 of file Model.cpp.
References jspace::tao_tree_info_s::info.
Referenced by opspace::CartPosTask::updateActual().
| taoDNode * jspace::Model::getNodeByJointName | ( | std::string const & | name | ) | const |
Retrieve a node by joint name.
This will find and retrieve the node to which the joint is attached (see also getNodeByName()), which allows you to retrieve the taoJoint instance itself.
Definition at line 248 of file Model.cpp.
References jspace::tao_tree_info_s::info.
| void jspace::Model::getJointLimits | ( | Vector & | joint_limits_lower, | |
| Vector & | joint_limits_upper | |||
| ) | const |
Retrieve joint limit information.
This method fills the provided vectors with the lower and upper joint limits. In case no joint limit information is available, it sets the lower limit to std::numeric_limits<double>::min() and the upper limit to std::numeric_limits<double>::max().
Definition at line 260 of file Model.cpp.
References jspace::tao_tree_info_s::info.
Referenced by jspace::jspace_controller_info_getter_s::getLimits().
| void jspace::Model::updateKinematics | ( | ) |
Computes the node origins wrt the global frame.
Definition at line 273 of file Model.cpp.
References jspace::tao_tree_info_s::root.
Referenced by update().
| bool jspace::Model::getGlobalFrame | ( | taoDNode const * | node, | |
| Transform & | global_transform | |||
| ) | const |
Retrieve the frame (translation and rotation) of a node origin.
Definition at line 285 of file Model.cpp.
Referenced by computeGlobalCOMFrame(), and computeGlobalFrame().
| bool jspace::Model::computeGlobalFrame | ( | taoDNode const * | node, | |
| Transform const & | local_transform, | |||
| Transform & | global_transform | |||
| ) | const |
Compute the global frame (translation and rotation) corresponding to a local frame expressed wrt the origin of a given node.
Definition at line 307 of file Model.cpp.
References getGlobalFrame().
Referenced by computeGlobalCOMFrame(), opspace::OrientationTask::updateActual(), opspace::CartPosTrjTask::updateActual(), opspace::CartPosTask::updateActual(), and tut05::PTask::updateStateAndJacobian().

| bool jspace::Model::computeGlobalFrame | ( | taoDNode const * | node, | |
| double | local_x, | |||
| double | local_y, | |||
| double | local_z, | |||
| Transform & | global_transform | |||
| ) | const |
Convenience method in case you are only interested in the translational part and hold the local point in three doubles.
The copmuted global_transform will have the same rotational component as the node's origin.
Definition at line 333 of file Model.cpp.
References getGlobalFrame().

| bool jspace::Model::computeGlobalFrame | ( | taoDNode const * | node, | |
| Vector const & | local_translation, | |||
| Transform & | global_transform | |||
| ) | const |
Convenience method in case you are only interested in the translational part and hold the local point in a three-dimensional vector.
The copmuted global_transform will have the same rotational component as the node's origin.
Definition at line 320 of file Model.cpp.
References getGlobalFrame().

| bool jspace::Model::computeGlobalCOMFrame | ( | taoDNode const * | node, | |
| Transform & | global_com_transform | |||
| ) | const |
Definition at line 346 of file Model.cpp.
References computeGlobalFrame(), and getGlobalFrame().

| bool jspace::Model::computeJacobian | ( | taoDNode const * | node, | |
| Matrix & | jacobian | |||
| ) | const |
Compute the Jacobian (J_v over J_omega) at the origin of a given node.
Definition at line 366 of file Model.cpp.
Referenced by computeCOM(), computeJacobian(), opspace::CartPosTrjTask::update(), opspace::CartPosTask::update(), opspace::OrientationTask::updateActual(), and tut05::PTask::updateStateAndJacobian().
| bool jspace::Model::computeJacobian | ( | taoDNode const * | node, | |
| double | gx, | |||
| double | gy, | |||
| double | gz, | |||
| Matrix & | jacobian | |||
| ) | const |
Compute the Jacobian (J_v over J_omega) for a given node, at a point expressed wrt to the global frame.
| bool jspace::Model::computeJacobian | ( | taoDNode const * | node, | |
| Vector const & | global_point, | |||
| Matrix & | jacobian | |||
| ) | const [inline] |
Convenience method in case you are holding the global position in a three-dimensional vector.
Definition at line 281 of file Model.hpp.
References computeJacobian().

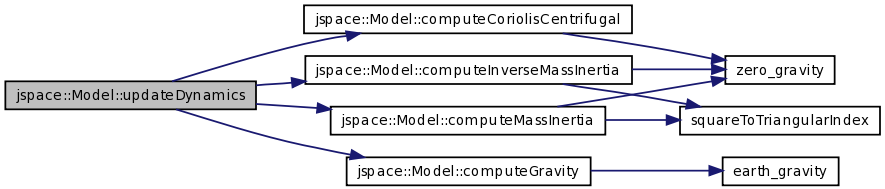
| void jspace::Model::updateDynamics | ( | ) |
Calls computeGravity(), computeCoriolisCentrifugal(), computeMassInertia(), and computeInverseMassInertia().
Definition at line 440 of file Model.cpp.
References computeCoriolisCentrifugal(), computeGravity(), computeInverseMassInertia(), and computeMassInertia().
Referenced by update().
Computes the location of the center of gravity, and optionally also its Jacobian.
Pass opt_jcom=0 if you are not interested in the Jacobian. Failures can only be due to calls of computeJacobian() that happens for each node's contribution to the Jacobian of the COM.
Definition at line 450 of file Model.cpp.
References computeJacobian(), and jspace::tao_tree_info_s::info.

| void jspace::Model::computeGravity | ( | ) |
Compute the gravity joint-torque vector.
Definition at line 484 of file Model.cpp.
References earth_gravity(), jspace::tao_tree_info_s::info, and jspace::tao_tree_info_s::root.
Referenced by updateDynamics().

| bool jspace::Model::disableGravityCompensation | ( | size_t | index, | |
| bool | disable | |||
| ) |
Disable (or enable) gravity compensation for a given DOF (specified using its index).
If you set disable to true, then getGravity() will knock out (set to zero) the corresponding entry of the gravity joint-torque vector.
true is returned. Valid indices are 0<=index<getNDOF().disable for this joint. | bool jspace::Model::getGravity | ( | Vector & | gravity | ) | const |
Retrieve the gravity joint-torque vector.
Definition at line 520 of file Model.cpp.
Referenced by opspace::ClassicTaskPostureController::computeCommand(), jspace::JointGoalController::computeCommand(), jspace::FloatController::computeCommand(), tut04::JTask::update(), and tut03::JTask::update().
| void jspace::Model::computeCoriolisCentrifugal | ( | ) |
Compute the Coriolis and contrifugal joint-torque vector.
If you set cc_tree=NULL in the constructor, then this is a no-op.
Definition at line 536 of file Model.cpp.
References jspace::tao_tree_info_s::info, jspace::tao_tree_info_s::root, and zero_gravity().
Referenced by updateDynamics().

| bool jspace::Model::getCoriolisCentrifugal | ( | Vector & | coriolis_centrifugal | ) | const |
Retrieve the Coriolis and contrifugal joint-torque vector.
Definition at line 549 of file Model.cpp.
Referenced by jspace::JointGoalController::computeCommand(), and tut04::JTask::update().
| void jspace::Model::computeMassInertia | ( | ) |
Compute the joint-space mass-inertia matrix, a.k.a.
the kinetic energy matrix.
Definition at line 563 of file Model.cpp.
References jspace::tao_tree_info_s::info, jspace::tao_tree_info_s::root, squareToTriangularIndex(), and zero_gravity().
Referenced by updateDynamics().

| bool jspace::Model::getMassInertia | ( | Matrix & | mass_inertia | ) | const |
Retrieve the joint-space mass-inertia matrix, a.k.a.
the kinetic energy matrix.
Definition at line 600 of file Model.cpp.
References squareToTriangularIndex().
Referenced by jspace::JointGoalController::computeCommand(), and tut04::JTask::update().

| void jspace::Model::computeInverseMassInertia | ( | ) |
Compute the inverse joint-space mass-inertia matrix.
Definition at line 621 of file Model.cpp.
References jspace::tao_tree_info_s::info, jspace::tao_tree_info_s::root, squareToTriangularIndex(), and zero_gravity().
Referenced by updateDynamics().

| bool jspace::Model::getInverseMassInertia | ( | Matrix & | inverse_mass_inertia | ) | const |
Retrieve the inverse joint-space mass-inertia matrix.
Definition at line 657 of file Model.cpp.
References squareToTriangularIndex().
Referenced by opspace::ClassicTaskPostureController::computeCommand().

| tao_tree_info_s* jspace::Model::_getKGMTree | ( | ) | [inline] |
| tao_tree_info_s* jspace::Model::_getCCTree | ( | ) | [inline] |
 1.5.4
1.5.4