
#include "tutsim.hpp"
#include <opspace/task_library.hpp>
#include <opspace/skill_library.hpp>
#include <opspace/ClassicTaskPostureController.hpp>
#include <jspace/test/sai_util.hpp>
#include <boost/shared_ptr.hpp>
#include <FL/fl_draw.H>
#include <err.h>
Go to the source code of this file.
Functions | |
| static std::string | model_filename (TUTROB_XML_PATH_STR) |
| static bool | servo_cb (size_t toggle_count, double wall_time_ms, double sim_time_ms, jspace::State &state, jspace::Vector &command) |
| static void | draw_cb (double x0, double y0, double scale) |
| int | main (int argc, char **argv) |
Variables | |
| static boost::shared_ptr < jspace::Model > | model |
| static boost::shared_ptr < opspace::ClassicTaskPostureController > | controller |
| static boost::shared_ptr < opspace::GenericSkill > | skill |
| static boost::shared_ptr < opspace::CartPosTask > | eetask |
| static boost::shared_ptr < opspace::JPosTask > | jtask |
| static opspace::Parameter * | eegoalpos |
| static opspace::Parameter * | eegoalvel |
| static opspace::Parameter * | jgoalpos |
| static opspace::Parameter * | jgoalvel |
| static size_t | mode |
This tutorial shows Cartesian trajectory tracking task with a controller joint posture in the nullspace of the task. It shows how to implement this behavior with opspace::Task subclasses from the provided task library, and by relying on the provided opspace::ClassicTaskPostureController to perform the dynamically consistent nullspace projection. It also introduces the concept of opspace::Skill, which provides a container for task hierarchies. For this example, we simply use the opspace::GenericSkill.
As usual, when the simulation starts, it is in swaying-reinitialization mode. After clicking Toggle once, the robot holds the current position in Cartesian as well as joint space. Clicking Toggle a second time starts a swaying joint-space motion in the nullspace of the task: the robot will attempt to minimize the difference between the actual and desired joint angles, without moving the position of the end-effector point. Clicking Toggle again enters Cartesian trajectory tracking mode with a constant joint posture, and clicking Toggle a fourth time makes the posture change continously while tracking the trajectory.
Definition in file tut06_eepos.cpp.
| static void draw_cb | ( | double | x0, | |
| double | y0, | |||
| double | scale | |||
| ) | [static] |
Definition at line 167 of file tut06_eepos.cpp.
References tutsim::draw_delta_jpos(), opspace::Parameter::getVector(), and mode.

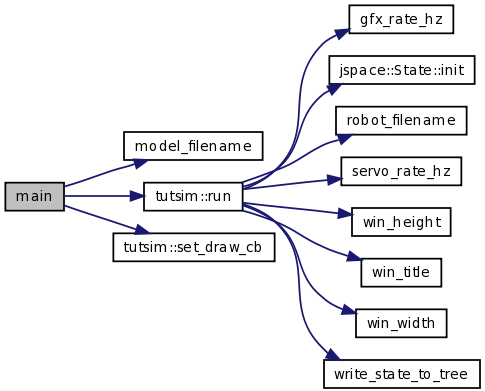
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 201 of file tut06_eepos.cpp.
References controller, draw_cb, eetask, jtask, model, model_filename(), opspace::PARAMETER_TYPE_VECTOR, tutsim::run(), servo_cb, tutsim::set_draw_cb(), and skill.
| static std::string model_filename | ( | TUTROB_XML_PATH_STR | ) | [static] |
| static bool servo_cb | ( | size_t | toggle_count, | |
| double | wall_time_ms, | |||
| double | sim_time_ms, | |||
| jspace::State & | state, | |||
| jspace::Vector & | command | |||
| ) | [static] |
Definition at line 73 of file tut06_eepos.cpp.
References controller, mode, model, jspace::State::position_, opspace::Parameter::set(), skill, and jspace::State::velocity_.

boost::shared_ptr<opspace::ClassicTaskPostureController> controller [static] |
opspace::Parameter* eegoalpos [static] |
Definition at line 66 of file tut06_eepos.cpp.
opspace::Parameter* eegoalvel [static] |
Definition at line 67 of file tut06_eepos.cpp.
boost::shared_ptr<opspace::CartPosTask> eetask [static] |
opspace::Parameter* jgoalpos [static] |
Definition at line 68 of file tut06_eepos.cpp.
opspace::Parameter* jgoalvel [static] |
Definition at line 69 of file tut06_eepos.cpp.
boost::shared_ptr<opspace::JPosTask> jtask [static] |
Definition at line 65 of file tut06_eepos.cpp.
size_t mode [static] |
Definition at line 70 of file tut06_eepos.cpp.
boost::shared_ptr<jspace::Model> model [static] |
Definition at line 61 of file tut06_eepos.cpp.
boost::shared_ptr<opspace::GenericSkill> skill [static] |
 1.5.4
1.5.4