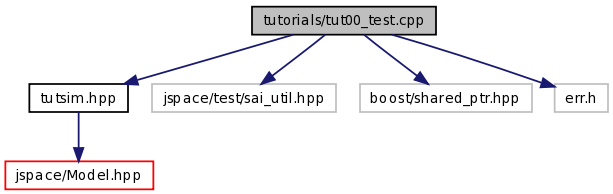
#include "tutsim.hpp"
#include <jspace/test/sai_util.hpp>
#include <boost/shared_ptr.hpp>
#include <err.h>
Go to the source code of this file.
Functions | |
| static std::string | model_filename (TUTROB_XML_PATH_STR) |
| static bool | servo_cb (size_t toggle_count, double wall_time_ms, double sim_time_ms, jspace::State &state, jspace::Vector &command) |
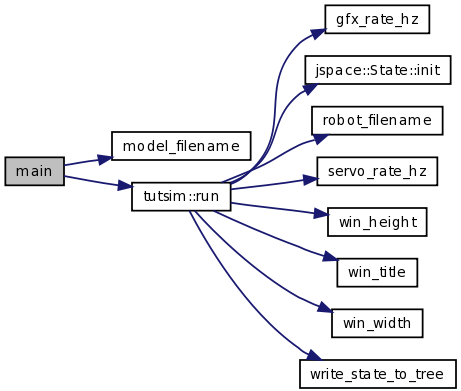
| int | main (int argc, char **argv) |
Variables | |
| static boost::shared_ptr < jspace::Model > | model |
A quick test to see whether the planar simulator works as expected. It starts by re-initializing the joint state to a swining motion, and when you press Toggle it sends zeroed-out torque commands to the robot. This makes the robot fall according to gravity from whichever position it was in when you press Toggle. Pressing Toggle again goes back to the initial mode.
Definition in file tut00_test.cpp.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 79 of file tut00_test.cpp.
References model, model_filename(), tutsim::run(), and servo_cb.
| static std::string model_filename | ( | TUTROB_XML_PATH_STR | ) | [static] |
Referenced by main().
| static bool servo_cb | ( | size_t | toggle_count, | |
| double | wall_time_ms, | |||
| double | sim_time_ms, | |||
| jspace::State & | state, | |||
| jspace::Vector & | command | |||
| ) | [static] |
Definition at line 44 of file tut00_test.cpp.
References model, jspace::State::position_, jspace::pretty_print(), and jspace::State::velocity_.

boost::shared_ptr<jspace::Model> model [static] |
Definition at line 41 of file tut00_test.cpp.
Referenced by main(), jspace::mass_inertia_explicit_form(), and servo_cb().
 1.5.4
1.5.4