#include <ClassicTaskPostureController.hpp>
Public Member Functions | |
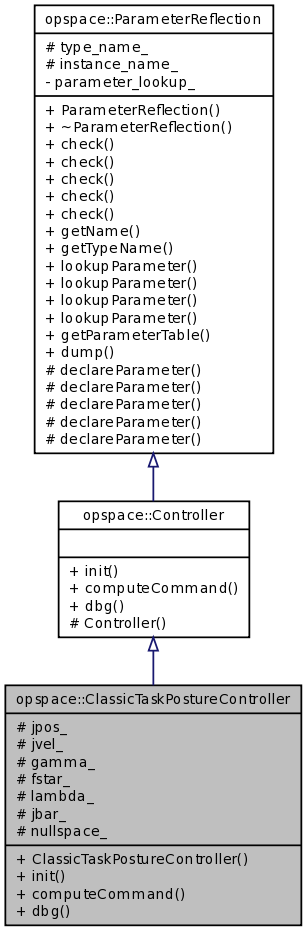
| ClassicTaskPostureController (std::string const &name) | |
| virtual Status | init (Model const &model) |
| virtual Status | computeCommand (Model const &model, Skill &skill, Vector &gamma) |
| virtual void | dbg (std::ostream &os, std::string const &title, std::string const &prefix) const |
Protected Attributes | |
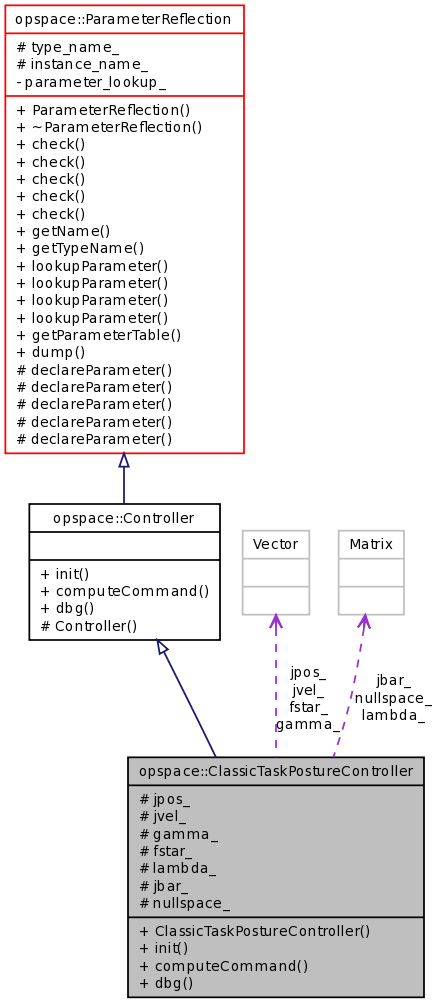
| Vector | jpos_ |
| Vector | jvel_ |
| Vector | gamma_ |
| Vector | fstar_ |
| Matrix | lambda_ |
| Matrix | jbar_ |
| Matrix | nullspace_ |
Definition at line 31 of file ClassicTaskPostureController.hpp.
| opspace::ClassicTaskPostureController::ClassicTaskPostureController | ( | std::string const & | name | ) | [explicit] |
Definition at line 37 of file ClassicTaskPostureController.cpp.
References opspace::ParameterReflection::declareParameter(), fstar_, gamma_, jbar_, jpos_, jvel_, lambda_, and nullspace_.

| Status opspace::ClassicTaskPostureController::computeCommand | ( | Model const & | model, | |
| Skill & | skill, | |||
| Vector & | gamma | |||
| ) | [virtual] |
Implements opspace::Controller.
Definition at line 58 of file ClassicTaskPostureController.cpp.
References fstar_, gamma_, opspace::Task::getCommand(), jspace::Model::getGravity(), jspace::Model::getInverseMassInertia(), opspace::Task::getJacobian(), jspace::Model::getNDOF(), opspace::Task::getSigmaThreshold(), jspace::Model::getState(), opspace::Skill::getTaskTable(), jbar_, jpos_, jvel_, lambda_, ndof, nullspace_, opspace::pseudoInverse(), and opspace::Skill::update().

| void opspace::ClassicTaskPostureController::dbg | ( | std::ostream & | os, | |
| std::string const & | title, | |||
| std::string const & | prefix | |||
| ) | const [virtual] |
Reimplemented from opspace::Controller.
Definition at line 117 of file ClassicTaskPostureController.cpp.
References fstar_, gamma_, jbar_, jpos_, jvel_, lambda_, and jspace::pretty_print().

Vector opspace::ClassicTaskPostureController::jpos_ [protected] |
Definition at line 48 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Vector opspace::ClassicTaskPostureController::jvel_ [protected] |
Definition at line 49 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Vector opspace::ClassicTaskPostureController::gamma_ [protected] |
Definition at line 50 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Vector opspace::ClassicTaskPostureController::fstar_ [protected] |
Definition at line 51 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Matrix opspace::ClassicTaskPostureController::lambda_ [protected] |
Definition at line 52 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Matrix opspace::ClassicTaskPostureController::jbar_ [protected] |
Definition at line 53 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), computeCommand(), and dbg().
Matrix opspace::ClassicTaskPostureController::nullspace_ [protected] |
Definition at line 54 of file ClassicTaskPostureController.hpp.
Referenced by ClassicTaskPostureController(), and computeCommand().
 1.5.4
1.5.4