#include <task_library.hpp>
Public Member Functions | |
| virtual Status | check (Vector const *param, Vector const &value) const |
| Verifies that kp, kd, and maxvel are non-negative. | |
| void | quickSetup (Vector const &kp, Vector const &kd, Vector const &maxvel) |
Protected Types | |
| enum | saturation_policy_t { SATURATION_OFF, SATURATION_COMPONENT_WISE, SATURATION_MAX_COMPONENT, SATURATION_NORM } |
| Velocity saturation policy. More... | |
Protected Member Functions | |
| PDTask (std::string const &name, saturation_policy_t saturation_policy) | |
| Status | initPDTask (Vector const &initpos) |
| Initialize the goalpos to initpos and the goalvel to zero. | |
| Status | computePDCommand (Vector const &curpos, Vector const &curvel, Vector &command) |
| Compute PD command, with velocity saturation determined by the saturation_policy specified at construction time. | |
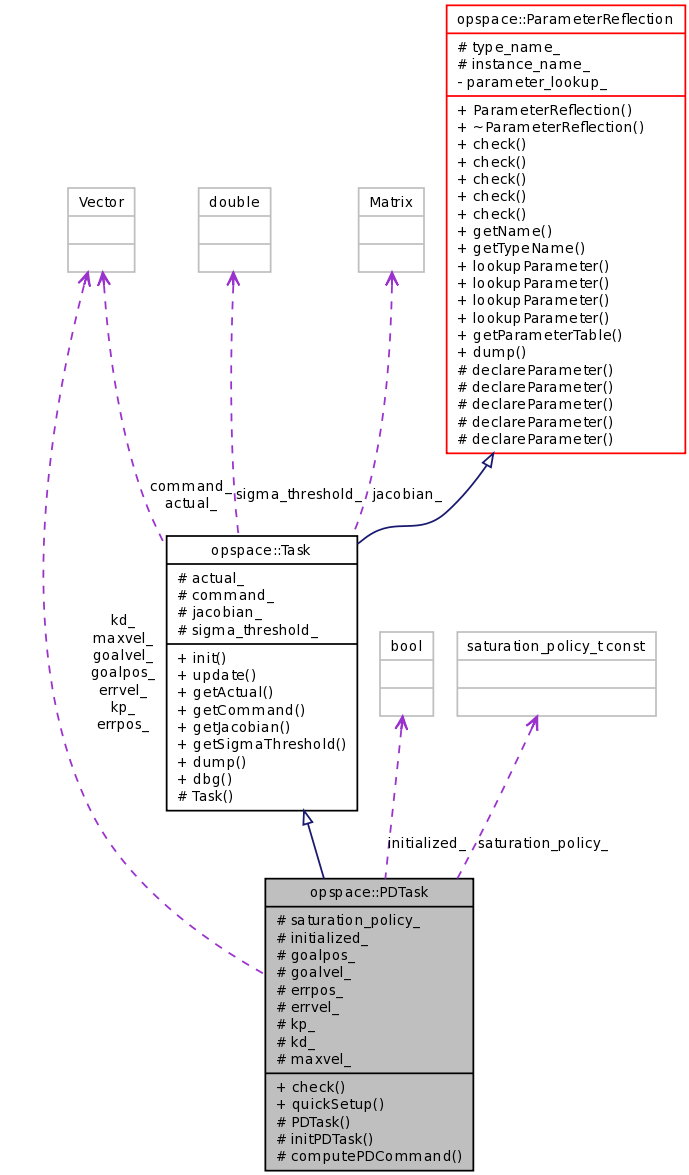
Protected Attributes | |
| saturation_policy_t const | saturation_policy_ |
| bool | initialized_ |
| Vector | goalpos_ |
| Vector | goalvel_ |
| Vector | errpos_ |
| Vector | errvel_ |
| Vector | kp_ |
| Vector | kd_ |
| Vector | maxvel_ |
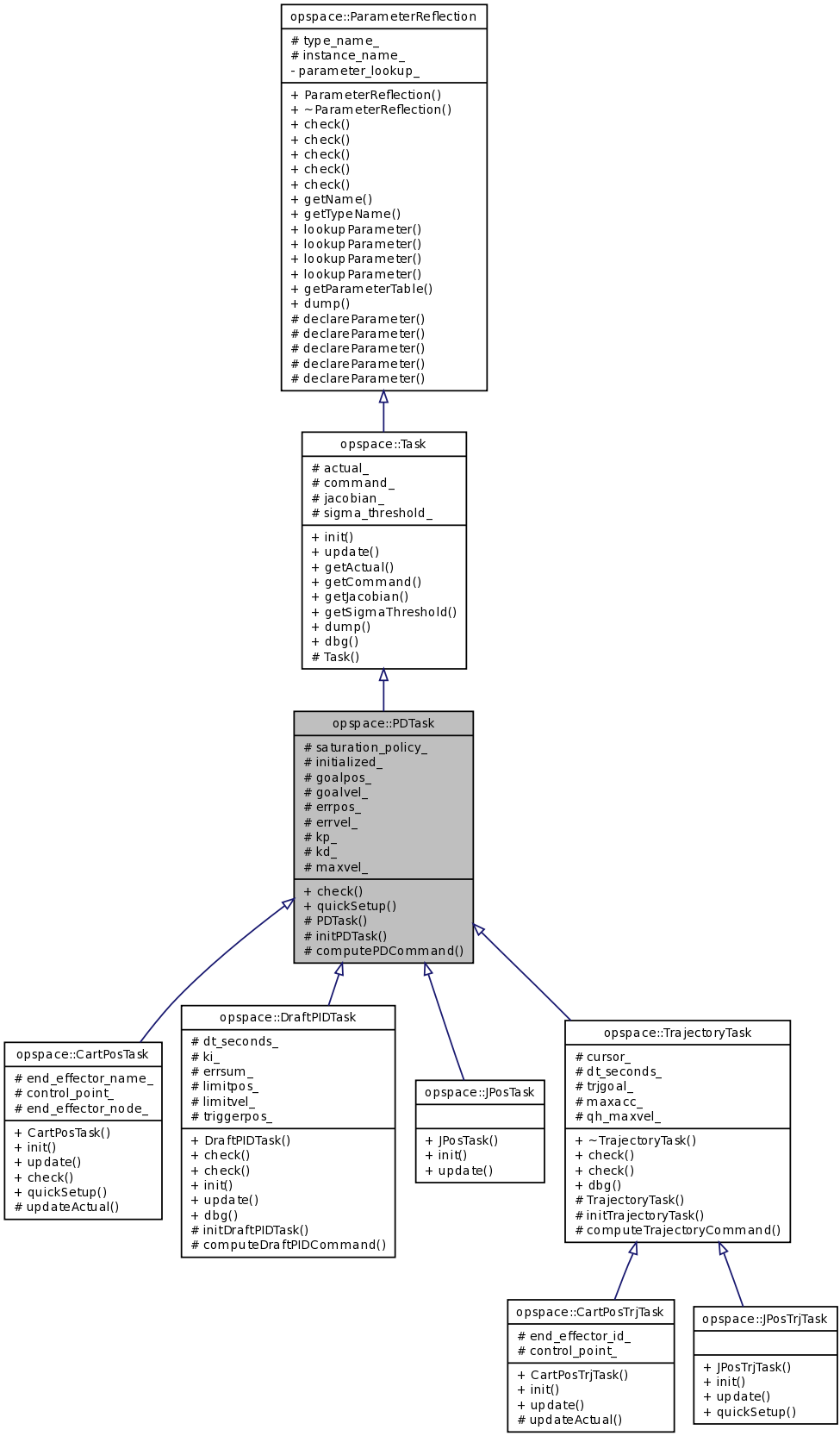
It provides a reusable implementation for the parameters and algorithm of a PD controller with velocity saturation.
Parameters:
Subclasses should call initPDTask() from within their init() method, and computePDCommand() from their computeCommand().
Definition at line 51 of file task_library.hpp.
enum opspace::PDTask::saturation_policy_t [protected] |
Velocity saturation policy.
Reimplemented in opspace::TrajectoryTask.
Definition at line 88 of file task_library.hpp.
| opspace::PDTask::PDTask | ( | std::string const & | name, | |
| saturation_policy_t | saturation_policy | |||
| ) | [protected] |
Definition at line 35 of file task_library.cpp.
References opspace::ParameterReflection::declareParameter(), errpos_, errvel_, goalpos_, goalvel_, kd_, kp_, maxvel_, and opspace::PARAMETER_FLAG_NOLOG.

| Status opspace::PDTask::check | ( | Vector const * | param, | |
| Vector const & | value | |||
| ) | const [virtual] |
Verifies that kp, kd, and maxvel are non-negative.
If initialized, also verifies the vector dimension for kp, kd, maxvel, goalpos, and goalvel.
Reimplemented from opspace::ParameterReflection.
Reimplemented in opspace::DraftPIDTask, and opspace::TrajectoryTask.
Definition at line 52 of file task_library.cpp.
References errpos_, errvel_, goalpos_, goalvel_, initialized_, kd_, kp_, maxvel_, SATURATION_NORM, and saturation_policy_.
Referenced by opspace::TrajectoryTask::check().
| void opspace::PDTask::quickSetup | ( | Vector const & | kp, | |
| Vector const & | kd, | |||
| Vector const & | maxvel | |||
| ) | [inline] |
Definition at line 65 of file task_library.hpp.
References kd_, kp_, and maxvel_.
Referenced by opspace::CartPosTask::quickSetup().
| Status opspace::PDTask::initPDTask | ( | Vector const & | initpos | ) | [protected] |
Initialize the goalpos to initpos and the goalvel to zero.
Also performs sanity checks on kp, kd, and maxvel. If saturation policy is opspace::PDTask::SATURATION_NORM, then kp, kd, and maxvel must be single-dimensional. Otherwise, if they are single-dimensional, this method converts them to N-dimensional vectors by filling them with N copies of the value. E.g. if kp=[100.0] and initpos is 3-dimensional, kp would end up as [100.0, 100.0, 100.0].
Definition at line 88 of file task_library.cpp.
References errpos_, errvel_, goalpos_, goalvel_, initialized_, kd_, kp_, maxvel_, SATURATION_NORM, and saturation_policy_.
Referenced by opspace::JPosTask::init(), opspace::CartPosTask::init(), opspace::DraftPIDTask::initDraftPIDTask(), and opspace::TrajectoryTask::initTrajectoryTask().
| Status opspace::PDTask::computePDCommand | ( | Vector const & | curpos, | |
| Vector const & | curvel, | |||
| Vector & | command | |||
| ) | [protected] |
Compute PD command, with velocity saturation determined by the saturation_policy specified at construction time.
This drives the task to achieving goalpos with goalvel.
Definition at line 142 of file task_library.cpp.
References errpos_, jspace::Status::errstr, errvel_, goalpos_, goalvel_, initialized_, kd_, kp_, maxvel_, jspace::Status::ok, SATURATION_COMPONENT_WISE, SATURATION_MAX_COMPONENT, SATURATION_NORM, and saturation_policy_.
Referenced by opspace::DraftPIDTask::computeDraftPIDCommand(), opspace::TrajectoryTask::computeTrajectoryCommand(), opspace::JPosTask::update(), and opspace::CartPosTask::update().
saturation_policy_t const opspace::PDTask::saturation_policy_ [protected] |
Definition at line 122 of file task_library.hpp.
Referenced by opspace::TrajectoryTask::check(), check(), computePDCommand(), initPDTask(), and opspace::TrajectoryTask::initTrajectoryTask().
bool opspace::PDTask::initialized_ [protected] |
Definition at line 123 of file task_library.hpp.
Referenced by opspace::DraftPIDTask::check(), check(), computePDCommand(), and initPDTask().
Vector opspace::PDTask::goalpos_ [protected] |
Definition at line 124 of file task_library.hpp.
Referenced by opspace::DraftPIDTask::check(), check(), computePDCommand(), opspace::TrajectoryTask::computeTrajectoryCommand(), initPDTask(), and PDTask().
Vector opspace::PDTask::goalvel_ [protected] |
Definition at line 125 of file task_library.hpp.
Referenced by check(), computePDCommand(), opspace::TrajectoryTask::computeTrajectoryCommand(), initPDTask(), and PDTask().
Vector opspace::PDTask::errpos_ [protected] |
Definition at line 126 of file task_library.hpp.
Referenced by check(), opspace::DraftPIDTask::computeDraftPIDCommand(), computePDCommand(), opspace::DraftPIDTask::dbg(), initPDTask(), and PDTask().
Vector opspace::PDTask::errvel_ [protected] |
Definition at line 127 of file task_library.hpp.
Referenced by check(), opspace::DraftPIDTask::computeDraftPIDCommand(), computePDCommand(), initPDTask(), and PDTask().
Vector opspace::PDTask::kp_ [protected] |
Definition at line 128 of file task_library.hpp.
Referenced by check(), computePDCommand(), initPDTask(), PDTask(), opspace::JPosTrjTask::quickSetup(), and quickSetup().
Vector opspace::PDTask::kd_ [protected] |
Definition at line 129 of file task_library.hpp.
Referenced by check(), computePDCommand(), initPDTask(), PDTask(), opspace::JPosTrjTask::quickSetup(), and quickSetup().
Vector opspace::PDTask::maxvel_ [protected] |
Definition at line 130 of file task_library.hpp.
Referenced by opspace::TrajectoryTask::check(), check(), computePDCommand(), initPDTask(), opspace::TrajectoryTask::initTrajectoryTask(), PDTask(), opspace::JPosTrjTask::quickSetup(), and quickSetup().
 1.5.4
1.5.4