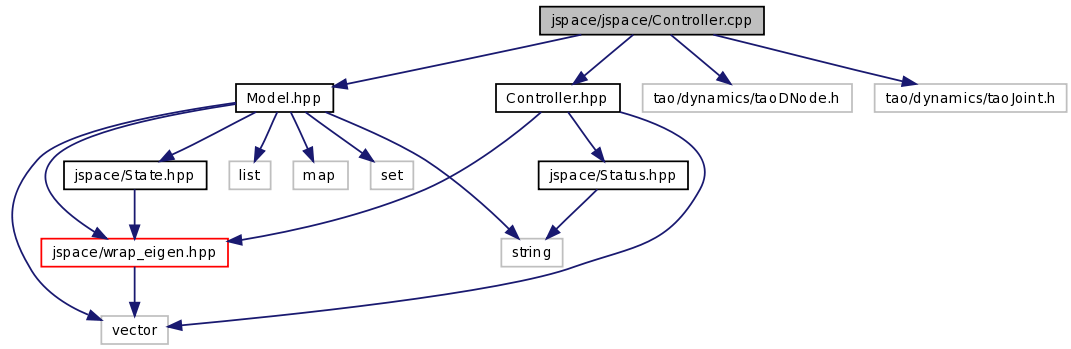
#include "Controller.hpp" #include "Model.hpp" #include <tao/dynamics/taoDNode.h> #include <tao/dynamics/taoJoint.h>
#include "Controller.hpp"
#include "Model.hpp"
#include <tao/dynamics/taoDNode.h>
#include <tao/dynamics/taoJoint.h>
Go to the source code of this file.
Definition in file Controller.cpp.
 1.5.4
1.5.4